

Accueil > Nos actions > Références & Support > Autres > Les enjeux de l'Océanographie : Analyse de la répartition spatiale des cibles acoustiques au sein de la colonne d’eau dans un estuaire
Le Projet
I) Introduction
Les outils acoustiques permettent d’analyser une grande surface, sans effets létaux sur la biomasse, et d’obtenir un grand nombre de données. À partir d’une approche acoustique menée au sein d’un estuaire, l’étude cherche à évaluer la répartition du peuplement de poissons, à savoir si ce compartiment est réparti de façon hétérogène dans la colonne d’eau et s’il est structuré verticalement et latéralement au cours du temps, à l’échelle des saisons. Pour ce faire, la colonne d’eau est découpée en plusieurs tranches afin d’obtenir
des valeurs pour chaque section (sub-surface, milieu et fond) et y appliquer une analyse statistique. Cette approche permettra d’améliorer les stratégies d’échantillonnage en estuaire pour mieux comprendre les facteurs éthologiques et physiologiques voire environnementaux de la dynamique des poissons afin de bâtir à terme un protocole standard d’échantillonnage et de suivi.
L’utilisation de méthodes acoustiques pour la détection de poissons, le suivi des
peuplements de poissons et leurs répartitions spatio-temporelles est largement répandue dans les milieux marins (Mesnil, 2003), lacustres (Mac Lennan & Simmonds, 1992 ; Marchal, 1985 ; Brandt, 1996 ; Guillard, 1991) mais aussi en rivières (Peirson & Frear, 2003) et plus récemment en estuaire (Guillard et al., 2004). Ces méthodes ont largement été utilisées sur des grands fonds pour évaluer les stocks des pélagiques (FAO, 2009) et observer leur évolution dans l’espace et le temps pour mieux comprendre la fonction des écosystèmes
pélagiques (Brierley et al., 2006). Cette technique pose plus de problèmes en petits fonds (inférieur à 10m) mais elle a évolué rapidement (Guillard & Marchal ,1998) ; dans un contexte où les rivières, zones littorales et côtières, estuaires, lagons, etc., sont, tant d’un point de vue qualitatif que quantitatif, très importants sur le plan écologique. Il est nécessaire de mieux connaître la dynamique et la structure des peuplements en estuaire en relation avec les facteurs environnementaux pour ainsi mieux appréhender leurs réponses aux changements écologiques et environnementaux. L’outil acoustique présente non seulement l’avantage de couvrir des étendues géographiques larges et de permettre d’étudier dans des zones non propices aux échantillonnages classiques par pêche, mais il permet avant tout d’éviter des dommages pour l’environnement et les poissons étudiés. Les campagnes vont ainsi permettre d’établir une stratégie d’investigation adaptée au milieu et de bâtir un protocole standard d’échantillonnage et de suivi pouvant répondre aux exigences des réglementations (notamment la Directive Cadre sur l’Eau) imposant des moyens d’observations et de mesure sans dommage pour la faune de poissons.
II) Un estuaire
Selon Fairbridge (1980), un estuaire est « un bras de mer pénétrant une vallée fluviale jusqu’à la limite amont de propagation de la marée, habituellement divisible en trois secteurs un bas estuaire ou estuaire marin, un estuaire moyen sujet à d’importants mélanges entre eaux douces et eaux salées et un haut estuaire ou estuaire fluvial, caractérisé par de l’eau douce mais des actions quotidiennes de la marée ».
Les estuaires ont un rôle important dans le fonctionnement des systèmes aquatiques assurant le bon déroulement du cycle biologique de nombreuses espèces (le maigre Argyrosomus regius, le saumon Salmo sp., les anguilles ainsi que les alevins Anguilla anguilla appelés civelle…) mais aussi le fonctionnement de la biosphère en général (production et relarguage de CO2 dans l’atmosphère) (Frankignoulle et al., 1998). Les estuaires présentent donc d’importants intérêts halieutiques pour les pêcheries continentales et/ou littorales. Il s’agit de milieux riches, divers et dont l’écosystème est très productif à l’interface continent-océan (Day et al., 1981 ; Costanza et al., 1997 ; Diouf, 1996 ; Odum & Heald, 1975). Pour des poissons tels que le gobie buhotte (Pomatoschistus minutus), les anchois (Engraulis encrasicolus) ou encore le hareng (Clupea harengus), les estuaires sont d’importantes zones de nourricerie et d’hivernage (Elliott & Hemingway, 2002), mais aussi des zones de pontes (Möller, 1987) et des voies migratoires incontournables pour les poissons amphihalins (Mc Dowall, 1988). L’estuaire offre aux juvéniles une protection contre la prédation car la turbidité y est forte, limitant ainsi la prédation à vue (Blaber & Blaber, 1980 ; Elliott et al., 1990 ; Maes et al., 1998 ; Maes, 2000 ; Pihl et al., 2002). Cette zone d’alimentation et de croissance permet une préparation physiologique à la migration (Mc Dowall, 1988). Les rejets en estuaire ont tendance à modifier la structure des estuaires au niveau de la
qualité. Les prélèvements (pompages) et surtout le stockage (barrages-réservoirs) tendent à une artificialisation du débit. Les systèmes biologiques sont modifiés et l’impact sur la répartition et la dynamique des biocénoses est difficilement appréciable du fait de la complexité du milieu et l’existence de peu de systèmes d’évaluation et de suivi. L’estuaire peut donc refléter une altération naturelle ou anthropique de l’environnement (Whitfield, 1996).

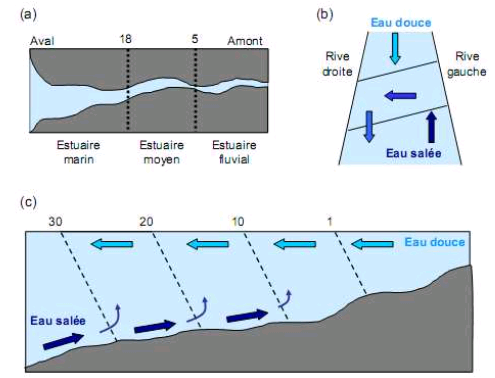
- les trois gradients de salinité dans les estuaires tempérés de l’hémisphère Nord
- (a) le gradient longitudinal ; (b) le gradient transversal ; (c) le gradient vertical. La
salinité est exprimée en psu (pratical salinity units). (Nicolas, 2010, d’après McLusky & Elliott, 2006)
Les eaux fluviales, rencontrant les eaux marines, sont plus chaudes en été et plus froides en hiver. La température de l’air a donc une répercussion sur l’évolution de la température de l’eau, avec un minima observé en janvier et un maxima en août. Cela se traduit par un gradient longitudinal, dû aux différences de températures entre les eaux fluviales et marines, de même qu’un gradient vertical, dû au mélange plus ou moins complet des masses d’eau et à l’ensoleillement (Girardin et al., 2007). Les écosystèmes estuariens subissent des pressions anthropiques importantes car ils forment des exutoires de bassins versants (connections en amont). Il en résulte des pollutions chroniques ou ponctuelles (Kraepiel et al., 1997 ; Grousset et al., 1999 ; Boudou, 2002 Marchand et al., 2002).
a) Pourquoi l’acoustique en estuaire ?
L’estuaire est un milieu où l’utilisation de techniques acoustiques, dans l’étude de la distribution spatiale et temporelle des populations de poissons, permet d’obtenir un grand nombre de données susceptibles de pouvoir être analysées et pouvant être mis en relation avec les paramètres du milieu pour une meilleure compréhension du fonctionnement de ce type de milieu. L’acoustique utilisée en zones peu profondes permet d’obtenir des images du milieu
complémentaires à celles obtenues par les techniques traditionnelles (pêche). Les espèces se tenant près des berges, posées sur le fond et à faible profondeur nécessitent l’utilisation de techniques complémentaires pour connaître la répartition spécifique du peuplement. C’est donc la combinaison entre la réalité biologique (pêche) et les essais d’échantillonnage acoustique qui permettra de mieux appréhender ce type de milieu important pour les poissons et d’établir un protocole standardisé d’échantillonnage répondant par la même occasion à la
Directive Cadre sur l’Eau. (Guillard, 1994 ; Guillard, 1996 ; Thorne, 1997 ; Steig & Johnston, 1996). Depuis la publication en 2000 de la DCE, l’intérêt des écologistes marins européens pour la bio-évaluation de l’impact humain sur les écosystèmes estuariens et littoraux s’est accrû (Simboura, 2004 ; Borja, 2005 ; Borja & Heinrich, 2005 ; Dauvin, 2005, 2007). Les pays de l’Union Européenne sont désormais chargés d’évaluer et surveiller la qualité des eaux grâce à des paramètres physiques, chimiques et biologiques définies dans l’annexe V de la DCE. La DCE exige donc la surveillance de la qualité de l’eau avec des méthodes conformes aux normes CEN ISO ou autres normes nationales ou internationales procurant ainsi des données de qualités et comparables entre elles.
La DCE recommande l’utilisation de la composante piscicole comme indicateur de qualité du milieu (Annexe V de la directive) dans les masses d’eau dites de « transition » : estuaires, deltas, lagunes littorales, marais littoraux saumâtres et baies semi-fermées. L’objectif étant de prévenir, à l’échelle communautaire, toute dégradation supplémentaire, d’évaluer, de préserver et d’améliorer l’état écologique des écosystèmes aquatiques (Lobry, 2004). L’acoustique en estuaire cherche donc à établir un indicateur bio-acoustique pour une possible quantification spatio-temporelle de la biomasse. Dans un souci d’éthique et de
développement durable, ce projet nécessite une approche précautionneuse pour préserver l’environnement. La pêche pose le problème de la mortalité des poissons et une faiblesse dans la surface d’échantillonnage ; en revanche, avec l’acoustique, la surface d’exploration est plus importante offrant une meilleure vision d’ensemble et réduisant le problème de mortalité par pêche.
III) Matériel et méthodes
Cette technique est basée sur les propriétés du son dans l’eau. Un son émis dans l’eau à une certaine fréquence, se propage sous forme d’ondes à une vitesse dépendante des caractéristiques du liquide : température, salinité et pression (Guillard & Colon, 1998). En effet, les ondes acoustiques sont le seul vecteur permettant le transport sous-marin d’informations aux caractéristiques facilement exploitables. Les ondes émises par des vibrations mécaniques (Lurton, 1998) sont réfléchies par toutes cibles rencontrées : le fond, la
surface, les poissons, les végétaux, …. Dans notre cas, les ondes nous intéressant sont celles qui sont réfléchies par les poissons. Il est de même possible de localiser des obstacles ou des cibles pour une possible identification et caractérisation de la cible (Lurton, 1998). Les échos ainsi produits sont réceptionnés par un transducteur électroacoustique, qui fonctionne en
émission-réception (MacLennan & Simmonds, 1992). Les transducteurs utilisés en acoustique sont directionnels, l’intensité acoustique est maximale dans l’axe central de la face active du transducteur. Elle décroît quand l’angle à partir de cet axe augmente jusqu’à ce qu’on obtienne le premier zéro ou le premier minimum du diagramme de directivité (Lévénez, 2001).

- représentation tridimentionnelle d’un diagramme de directivité. (Eckart, 1968)

Les domaines d’utilisations de l’acoustique sont très variés et peuvent être utilisés à des fins militaires (ex : sous-marins), océanographiques (évaluation de la hauteur de la colonne d’eau, détection des bancs de poissons pour la pêche), en géologie marine par cartographie acoustique et pour l’industrie pétrolière offshore en sismique) (Lurton, 1998).
Il existe deux types de systèmes acoustiques (Lurton, 1998) :
· le système acoustique de type actif : il utilise l’émission d’un signal qui lui est propre et qui sera, soit réfléchi sur une cible, soit transmis directement à un récepteur (à une fréquence donnée). C’est ce type de système qui est utilisé dans cette étude sur l’estuaire.
· le système acoustique de type passif : il intercepte et exploite des signaux émis par la cible elle-même. Il est plutôt utilisé pour la détection des mammifères marins qui ont un signal spécifique pour chaque espèce. Les signaux sont captés par des hydrophones.

- représentation schématique de la zone détectée par deux sondeurs (émission verticale et horizontale), et représentation graphique. (D’après Marchal, 1985)
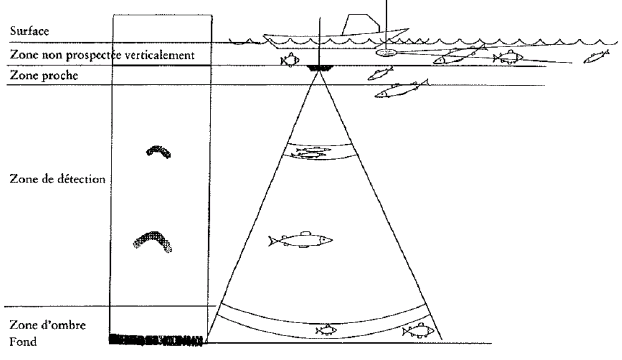
L’acoustique, utilisée pour la détection de poissons engendre des zones d’ombre. En effet le signal émis, de forme conique, impose une zone, située entre le front du signal et le fond, pour laquelle l’écho retour des poissons est totalement perdu dans le fond (Simmonds & MacLennan, 2005) et en surface dans les premiers centimètres de la colonne d’eau. Toutes les cibles présentent dans le faisceau de l’onde émise seront alors détectées grâce à l’écho provoqué lors de la réflexion de l’onde incidente. La zone proche (ou zone aveugle) est perturbée par la formation de bulles et le temps d’émission rend la réception impossible.
a) Influence du milieu sur la propagation du signal acoustique
Le milieu de propagation impose de nombreuses limitations quant à la propagation du signal : pendant la progression de l’onde dans le milieu, il y a un phénomène de perte d’intensité et une absorption de l’énergie acoustique par le milieu (Lurton, 1998). Cela conditionne l’amplitude du signal reçu et donc les performances du récepteur dépendront directement du rapport signal-bruit.
En considérant les pertes par amortissement, on observe que l’intensité des signaux transmis à travers la colonne d’eau est atténuée car l’énergie acoustique est absorbée dans l’eau, ce qui limite la portée du signal. Le son est atténué par la friction entre les particules, une partie de l’énergie est perdue à cause de la viscosité du milieu (frottement), la salinité, la température et la diffusion (Lévénez, 2001).
En général, plus les fréquences sont élevées et plus la perte sera forte (Simmonds & MacLennan, 2005). La célérité change donc avec la période de la journée, les saisons, la profondeur, la proximité géographique d’embouchures de fleuves, etc (http://www.mpl.ird.fr/suds-en-ligne...). La propagation est perturbée par les variations de célérités du son et par les réflexions des signaux sur les
interfaces (surfaces et fond). Les signaux transmis sont déformés à cause de l’hétérogénéité du milieu.

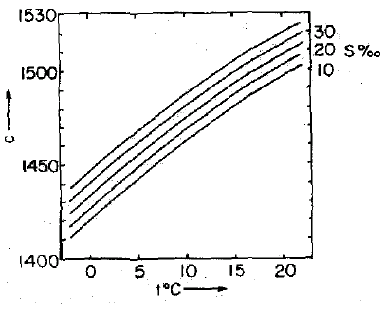
- variabilité de la célérité du son dans l’eau en fonction de la salinité et de la température. (Lévénez, 2001)
Le signal peut aussi être modifié par le bruit ambiant, dû à l’agitation en surface, au trafic maritime aux organismes vivants (cétacés, crustacés…), et dont les variations sont importantes,. Egalement, le bruit propre du système acoustique et du navire en général peut contraindre le signal. Parmi ces bruits, les bulles formées en surface (vent, houle) imposent une grande modification du signal et ont tendance à augmenter l’absorption et la diffusion des signaux acoustiques. Quand la couche de bulle s’étend à proximité du transducteur, l’amplitude de l’écho est réduite. Le mouvement du navire de prospection peut aussi induire
la formation de bulles comme en témoigne la mousse formée dans le sillage du bateau. Il faut donc impérativement minimiser la formation de bulles afin d’éviter l’absorption des signaux émis dans la couche de bulles et obtenir un niveau de bruit supplémentaire provoqué par l’éclatement de ces dernières (Lurton, 1998 ; Simmonds & MacLennan, 2005). La formation de bulles est très courante en petit fond et, par exemple, lors de mission, il a été impossible de récupérer des données valables en raison d’une trop grande agitation de surface.
b) Rétrodiffusion volumique des poissons
Les signaux émis subissent des réflexions successives sur les interfaces du milieu (surface et fond). L’onde incidente sur une cible donnée produit une rétrodiffusion. Cette rétrodiffusion est à l’origine des trajets multiples. L’énergie acoustique de l’onde incidente est retenue à l’intérieur par diffusion répétée dans le milieu et elle s’échappera progressivement (Simmonds & MacLennan, 2005). Un signal peut donc se propager d’une source à un récepteur selon plusieurs trajets sonores distincts (direction et durée différentes) et le signal
principal « direct » arrive alors, accompagné d’une trainée d’échos dû à la rétrodiffusion des ondes par une cible (fond, poissons isolés, bancs, sous marins, épaves, mines, pipelines…) dans toutes les directions de l’espace (Lurton, 1998).

- rétrodiffusion acoustique d’un organisme marin. (Lévénez, 2007)

La plupart des poissons possèdent une vessie natatoire, il s’agit d’un organe formant une poche de gaz. Cette vessie permet aux poissons d’ajuster leur flottabilité. À cause du large contraste de densité entre le gaz et le milieu liquide, la vessie possède d’importantes propriétés acoustiques. Elle peut agir comme une aide auditive et contribue à obtenir l’énergie acoustique dans l’écho des poissons (Simmonds & MacLennan, 2005).

- illustration d’une vessie natatoire chez un poisson osseux. (http://membres.multimania.fr/cpe034/Aquariophilie/Aquariophilie3.html)
C’est par la présence de la vessie natatoire ou du son caractéristique d’une cible que l’on peut obtenir un écho de l’onde incidente, et utiliser la méthode d’écho-intégration. Cette méthode permet d’estimer la quantité de poissons dans le faisceau de l’onde acoustique si le signal reçu contient ou non des échos se chevauchant. Pour la mesure, il est important de connaître l’indice de cible (target strength) des poissons afin d’estimer à partir de l’énergie totale le nombre d’individus dans le banc ou isolé : en effet, l’écho renvoyé par volume d’une cible est calculable en corrigeant l’indice de cible d’un poisson isolé, par la densité de poissons par mètre cube. L’hypothèse de la sommation énergétique des contributions des différents individus est à la base de la méthode
d’écho-intégration pour déterminer un stock de poissons : l’écho reçu par le sondeur est proportionnel à la surface réfléchissante de la cible.
Dans le cas des poissons, il dépend donc de la masse de la cible, de sa position dans la colonne d’eau, avec des échos plus intenses pour les grosses cibles. Les poissons ont des valeurs d’indice de cible de l’ordre de -40 à -50 dB en sachant que la valeur augmente avec la taille du poisson. Aux fréquences proches de la résonance de la vessie natatoire (1 à 5 kHz), l’indice de cible est de l’ordre de -30 dB. Il suffit alors, d’intégrer les valeurs des échos sur une longueur de parcours choisie. I1 reste ensuite à extrapoler ces valeurs à la surface totale
du secteur étudié pour obtenir une image de la biomasse de poissons dans ce secteur (Stequert & Gerlotto, 1983). Cet indice est valable si l’on néglige la contribution de l’énergie rétrodiffusée après diffusion par une cible et si l’on néglige l’effet de masquage des poissons entre eux. Cette méthode d’écho-intégration peut aussi être utilisée pour la surveillance des stocks de poissons
à des fins scientifiques ou économiques, pour déterminer des espèces pour la surveillance et la gestion des populations et pour l’application de stratégies de pêche sélective par les professionnels. Ces signaux acoustiques permettent d’aider à l’identification des espèces à partir des caractéristiques des échos élémentaires ou des paramètres associés à la structure et au comportement des cibles (Lurton, 1998).
b) Matériel
Il existe une littérature importante et croissante dans l’acoustique. Les applications et pratiques sont de plus en plus variées et ceci grâce à une large évolution de l’outil. Leonard de Vinci découvrit, en 1490, qu’en écoutant à travers un long tube il était possible d’entendre les navires qui naviguaient sur l’océan. Kimura installa en 1929 un émetteur et un récepteur de chaque côté d’un étang d’aquaculture qui lui permit de découvrir que l’amplitude du faisceau de l’onde incidente était perturbée lorsque des cibles se trouvaient dans son champ. La Seconde Guerre Mondiale permit un rapide développement de l’outil
acoustique pour la détection de poisson (Hodgson, 1950 ; Hodgson & Fridriksson, 1955). Dans les années 60, plusieurs appareils de comptage automatique d’écho couplés à un sondeur furent proposés mais il fallut attendre Dragsund et Olsen inventent l’échointégrateur qui met profit la relation entre la densité de poissons et le carré du voltage de leur écho, technique toujours largement utilisée à notre époque. Ainsi, dans les années 80, l’échointégration devint une technique d’usage très répandu où les échosondeurs sont équipés d’un traitement numérique du signal et de nouvelles techniques pour la mesure de l’intensité de cible (target strength (TS)) in situ apparaissent.
Simrad en Norvège mit au point la technique des faisceaux scindés (split beam)
apportant en plus de la mesure de TS la possibilité de repérer précisément la position des poissons dans le faisceau acoustique et par conséquent de suivre la trajectoire de ceux-ci (tracking). En effet, à l’origine, le transducteur à mono-faisceau ne fournissait pas d’information quant à l’orientation de la cible. Il pourrait résulter d’un petit poisson sur l’axe de l’onde comme d’un grand près du bord du lobe principal. Il était donc d’usage d’accepter uniquement les signaux dépassant un certains seuils. C’est pourquoi, les transducteurs à
doubles faisceaux (dual-beam) puis à faisceau partagé (split-beam) ont été développés pour la mesure directe de l’intensité acoustique de la cible. Ce dernier, à faisceau partagé a un transducteur divisé en quatre quadrants permettant ainsi de connaître la position et la direction de la cible en comparant les signaux reçus par chaque quadrant (par triangulation). L’impulsion d’émission est appliquée à l’ensemble du transducteur, mais les signaux reçus par chaque quadrant sont traités séparément.
- Le montage
Il existe deux archétypes de systèmes d’acoustiques sous-marines : le sondeur et le sonar. Dans le langage courant un sondeur est un appareil destiné à émettre verticalement des ondes sonores et à recevoir les échos et donc principalement utilisé dans les domaines de la pêche et scientifique (halieutique et géoscience). Les sonars, toujours dans le langage courant, présentent les mêmes principes de fonctionnement que les sondeurs mais contrairement (ou
complémentairement) au sondeur qui travaille verticalement, les émissions et réception des sonars se font dans des plans obliques. Ils sont donc adaptés à l’observation du milieu autour d’un bateau, soit de façon directionnelle (frontale ou latérale par exemple) soit de façon omnidirectionnelle, soit les deux. Le traitement des données sonar est plus complexe que celui des données de sondeurs du fait du trajet non linéaire des ondes acoustiques lorsque les
conditions du milieu sont hétérogènes. C’est donc avec les sondeurs que l’approche acoustique dans cette étude a été réalisée.
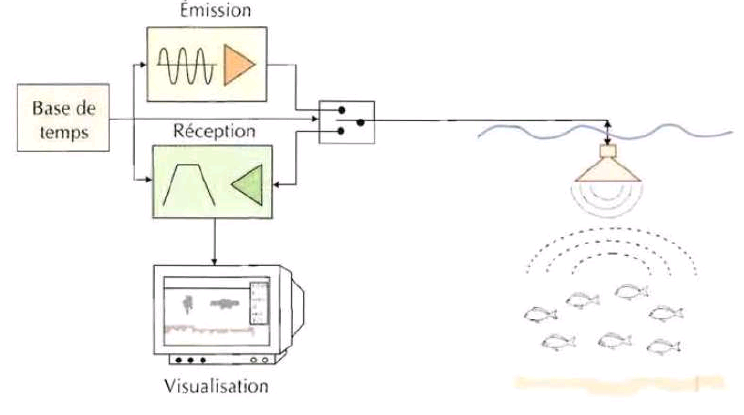
Le sondeur se compose d’une électronique d’émission (mise en forme du signal, amplification et synchronisation), d’un transducteur directif orienté verticalement
(émission et réception), d’une électronique de réception (filtrage bande passante, quadration et intégration) et de mesure du temps de propagation (datation et détection de l’écho du fond) et enfin d’un système de présentation des échos détectés (écran d’affichage) (Lurton, 1998).

- schéma du montage d’un sondeur de pêche. (Lurton, 1998)
Pour la détection des poissons des transducteurs électroacoustiques sous-marins sont utilisés. On appelle « transducteur » un appareil qui convertit une forme d’énergie électrique en une énergie acoustique et vice versa (Lévénez, 2001). Ils sont indispensables pour l’émission comme pour la réception des signaux acoustiques transmis dans l’eau.
La génération d’une onde acoustique dans le milieu se fait en utilisant les propriétés piézoélectriques des cristaux (naturels ou artificiels) : l’application d’un champ électrique ou magnétique provoque une déformation dans le milieu (=l’onde est transmise). L’effet inverse est utilisable en réception. Il s’agit de la technologie Tonpilz.

- schéma d’un transducteur Tonpilz. (Lurton, 1998)
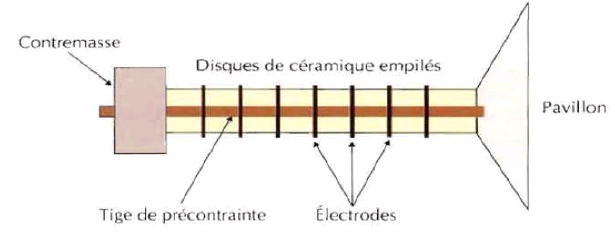
L’empilement des disques de céramiques est polarisé, il est solidaire d’un pavillon (équilibré par une contremasse) transmettant à l’eau les vibrations grâce à l’application d’un champ électrique (Lurton, 1998). Pour obtenir de meilleurs niveaux d’émission, il est possible d’utiliser les fréquences
de résonances mais en compromis avec une bande passante (largeur d’une plage de fréquence) assez large, afin de laisser passer les fréquences voisines. Enfin, pour optimiser le fonctionnement de ce système, on peut chercher à favoriser certaines directions d’émissions ou de réceptions (Lurton, 1998) et le transducteur focalise ainsi la puissance acoustique dans une direction privilégiée au cours de l’émission. Il est également plus sensible aux échos provenant de cette même direction. Cette propriété permet de mieux séparer les échos de
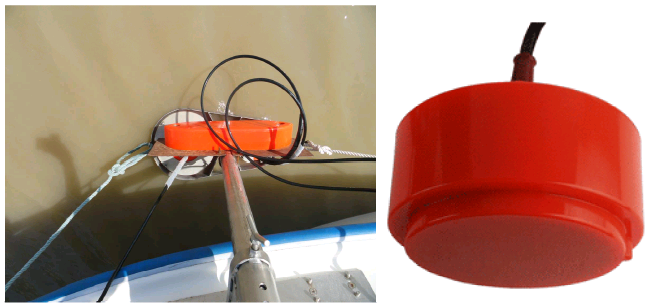
cibles rapprochées et de réduire les bruits parasites provenant d’autres directions. On appelle « antenne » un récepteur étendu constitué de plusieurs hydrophones. Ils sont généralement installés sous la coque du navire dans une zone choisie afin d’éviter la moindre perturbation acoustique (bulle et bruit de l’hélice) et doit, si possible bien épousé la forme de la coque. Dans notre cas, les sondeurs sont installés sur une perche afin d’avoir une plus grande flexibilité dans notre manipulation et donc pour être plus autonome.

- sondes sur une perche à l’avant tribord du navire
Le faisceau permet d’observer et de détecter des poissons ou des cibles individuelles en fonction de la fréquence et du pouvoir de résolution de l’instrument utilisé. Cette observation se fait sur un écran d’affichage dit « échogramme ». Le sondeur permet de même la quantification de la biomasse par le traitement d’écho-intégration et la classification des poissons (Sv) et/ou des cibles individuelles (TS) par analyse multifréquentielle.
Plus le nombre de fréquences différentes est important plus la classification sera fiable. Le sondeur monofaisceau vertical est, dans le cadre de l’évaluation de la ressource halieutique, la technique acoustique la plus simple et la plus fiable à mettre en place en estuaire (Girardin, 2010).

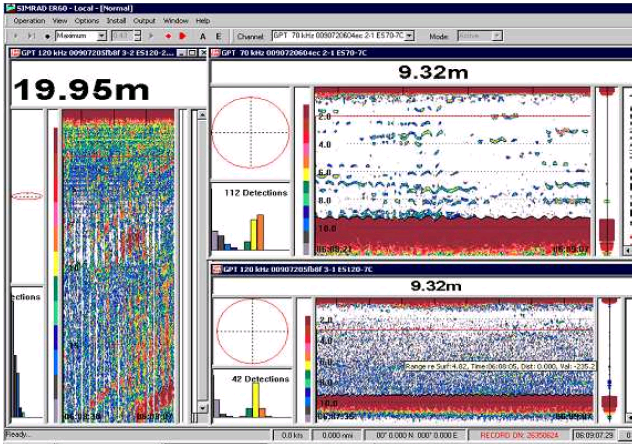
- exemple d’échogramme observé avec un SIMRAD EK60.
Méthode de traitement des données
Le logiciel Sonar5 est un logiciel de traitement acoustique, capable d’analyser données pour plusieurs fréquences et de convertir les données acquises sur le terrain pour qu’elles soient traitées ultérieurement comme ci-après. Il permet aussi d’éliminer le bruit (bulles et turbidité) et de traiter les données à différents seuils de détection acoustique. (http://www.simrad.com/www/01/nokbg0...)
On peut aisément découper la colonne d’eau sur sa hauteur (surface, milieu et fond) ainsi que sur sa longueur afin d’analyser un volume de la colonne d’eau précis. Pour ce faire, on utilise la boite de dialogue : analyse spatiale et contrôle des biomasses.
On travaille à un seuil de détection acoustique (thresholds) de -60dB, valeur qui
assure un compromis entre l’élimination du bruit et la conservation des détections d’origines
biologiques.
Ce logiciel permet d’analyser la colonne d’eau et d’obtenir des valeurs Sa, Sv et TS (Simmonds & MacLennan, 2005 ; MacLennan et al., 2002) :
TS (Target Strength) est l’indice de réflexion d’une cible, rapport de l’intensité sonore réfléchie par un poisson sur l’intensité sonore incidente, c’est une mesure acoustique de la taille des poissons, elle est exprimée en dB donc une valeur logarithmique.
Le TS est obtenue à partir de : TS = 10 log 10 (σ bs ) avec σ bs = 10
(TS/10) où σ bs est une mesure de l’intensité des ondes incidentes et rétrodiffusés en mètre carrés (unité du système international). Il est possible de calculer la taille véritable, en s’aidant de l’équation de Love (1971, 1977) par exemple : TS = m log L + b où « m » et « b » sont des constantes d’une espèce donnée et « L » est la longueur totale du poisson.
Sv (Volume backscattering strength) est l’intégration de l’énergie diffuse des cibles par unité de volume, elle est exprimée en dB, une valeur logarithmique. Elle se calcule avec la formule suivante : Sv = 10log (s v ) avec s v = Σ σ bs /V 0 où V 0 est le volume échantillonné.
Sa (Area backscattering coefficient) est l’intégration de l’énergie diffuse des cibles par unité de surface, elle est donnée en valeur arithmétique (m2/m2), c’est une expression de la densité. Elle se calcule avec la formule suivante : Sa=10 log10 (s a ) avec s a = ∫ s v dz où z est la profondeur et s a l’intégrale de Sv.
Les données acquises grâce aux transducteurs de 70kHz et 120kHz sont ainsi
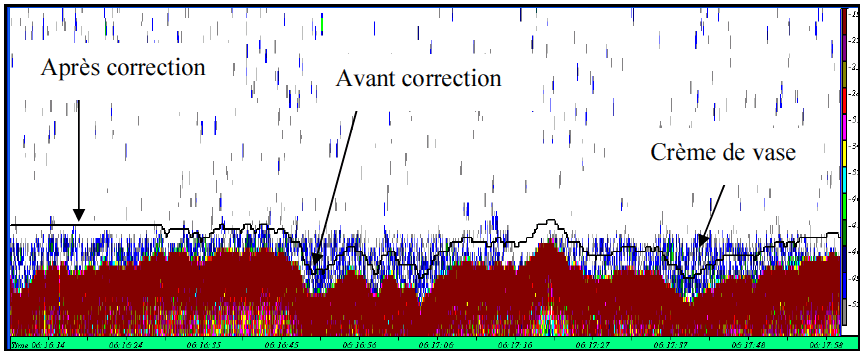
analysées. logiciel permet aussi de régler et/ou corriger le « bottom » c’est-à-dire le fond, afin d’éviter d’inclure des éléments non biologiques, comme de la crème de vase, dans le traitement acoustique. Si des éléments tels que la vase sont inclus dans le traitement de donnée, cela peut se traduire par des valeurs faussées. La correction se fait manuellement, en zoomant sur le fond tout en redessinant la ligne de fond.

- crème de vase au fond de la colonne d’eau, une correcton du bottom est donc nécessaire.
Statistique
Dans ce type d’étude, nous cherchons à savoir s’il « existe une évolution du peuplement au sein même de la colonne d’eau ? ». Pour ce faire, on dispose d’une base de données acquise
lors de plusieurs missions au printemps, en été, à la mi-été, à l’automne et à la fin automne). Le logiciel Sonar5 nous permet de découper la colonne d’eau en trois parties distinctes (surface, milieu et fond) et d’y calculer les valeurs Sa,
Sv et TS pour chaque profil réalisé. Ces valeurs sont rangées dans un tableau qui nous servira de base de données pour les tests statistiques dont les hypothèses sont les suivantes :
H0 : on observe le même nombre ainsi que la même taille d’individus que l’on se trouve à la surface, au milieu ou dans le fond de la colonne d’eau : la distribution est donc aléatoire.
H1 : on n’observe pas le même nombre ni la même taille d’individus que l’on se
trouve à la surface, au milieu ou dans la fond de la colonne d’eau : la distribution est donc structurée.
Les tests sur lesquels nous allons nous appuyer seront non paramétriques car d’une part les variables étudiées ne suivent pas la loi normale de Gauss et, d’autre part, il n’y a pas assez d’individus statistiques (n<30) pour des tests paramétriques. Les deux tests que l’on va utiliser sont les tests de rang de Kruskal Wallis et de Wilcoxon.
Le test de Kruskal Wallis vérifie l’hypothèse nulle selon laquelle deux groupes ou plus proviennent de la même distribution, contre une hypothèse alternative (H1) selon laquelle au moins un des groupes provient d’une distribution différente. On obtient une valeur dite « pvalue » ou « probabilité critique » qui correspond à la plus petite des valeurs de risque de première espèce (rejeter l’hypothèse privilégiée H0 alors qu’elle est vraie) pour lesquelles la décision serait de rejeter H0. Si la p.value < 5%, on rejette H0 avec un risque alpha de 5% de tromper et les moyennes de densité ainsi que les tailles ne sont pas homogènes de la
surface vers le fond, la distribution est donc structurée. L’ensemble des valeurs seront par la suite rangées et classées dans un tableau.
Le test de Wilcoxon compare deux à deux les valeurs de surface, milieu et fond.
Ainsi, il teste l’hypothèse nulle (H0) selon laquelle la somme des différences entre les rangs homologues est égale à zéro ce qui signifie qu’il n’y a pas de différences entre les données de surface, du milieu et du fond. Si ce n’est pas le cas, l’hypothèse nulle est rejetée avec un risque alpha (=5%) de se tromper. On obtient de la même façon que le test précédent des pvalues qui seront rangées et classées dans un tableau.
Ces séries de tests réalisés pour les différentes parties de l’estuaire à la fois nous permettant ainsi d’analyser nos données selon trois axes. La
première comparaison, consistera à tester l’hypothèse selon laquelle la distribution des densités et des tailles des cibles est homogène ou pas dans la colonne d’eau pour une même saison : c’est l’approche saisonnière. La deuxième comparaison, servira à confronter les missions d’une même fréquence entre elles pour chaque section de la colonne d’eau et dans les deux directions (aval – amont). Enfin, la dernière comparaison sera multifréquentielle, c’est-à-dire qu’elle nous permettra de savoir si les observations à 70 kHz sont différentes ou non des observations à 120 kHz. Cette comparaison est effectuée pour chaque section de la colonne d’eau. Ces tests statistiques sont effectués à partir d’un logiciel de traitements statistiques R et de l’éditeur Tinn-R et ne se baseront que sur les données des pleines mers de début de journée. Les données de pleines mers d’après midi ne seront pas utilisées car les observations y sont différentes.
IV) Résultats, discussion et perspectives
Afin de répondre au mieux à la problématique qui est de caractériser la distribution de la biomasse de poissons dans la colonne d’eau et dans un but de mieux appréhender leurs comportements au cours du temps, le travail a été divisé en trois étapes : tout d’abord, une analyse descriptive est effectuée à l’aide d’histogrammes cumulés, de « box-plot » et de nuages de points afin de connaître l’évolution de la taille et de la densité des individus en direction aval et amont au cours des différentes saisons. Les nuages de points permettront de
connaitre la ou les sections de la colonne d’eau qui influencent la distribution des cibles. Cette analyse sera ensuite approfondie avec une série de tests statistiques décrits ci-dessus dans le but de mettre en évidence des phénomènes ainsi que l’approche multifréquentielle. Enfin, une comparaison de tendances entre les données permettra de confronter les observations acoustiques aux observations biologiques. Toutes les analyses seront divisées pour la direction aval et amont afin de voir si la répartition de la biomasse de poissons est fonction de la marée.
De même, les analyses seront divisées dans le but d’observer une possible différence de structure de la biomasse de poissons le long de la zone d’étude.
L’utilisation de l’acoustique permet d’étudier l’évolution des biomasses de poissons et de leurs structures, en termes de densités et de tailles. Sans prélèvements dans le milieu, on évite les dommages pour l’environnement et la faune associée. Le suivi par stratégies combinées (zigzags, stations fixes et radiales répétées) permet d’échantillonner un grand volume d’eau en un temps relativement faible et donc de décrire la distribution spatiale des populations de poissons dans la zone et l’évolution des densités au cours du temps (Guillard
et al., 2004). Parallèlement, des données expérimentales de pêches, issues des campagnes, ont été utilisées pour les comparer aux données acoustiques et savoir si les observations acoustiques pouvaient confirmer les observations biologiques. Les campagnes ont eu pour objectif d’étudier la distribution de la biomasse de poissons dans trois sections de la colonne d’eau : la surface, le milieu et le fond, au cours du temps, à l’échelle saisonnière. En réalisant des échantillonnages biologiques propres aux campagnes acoustiques et donc plus adaptées, on pourrait acquérir de plus amples informations concernant, la taille,
la densité et le type d’espèces observées. On aurait ainsi une meilleure information sur les espèces présentes au moment de l’acquisition des données acoustiques. Bien que l’ensemble des détections acoustiques ne puissent pas être identifiées individuellement et associé à une espèce, on obtient tout de même une information directe sur l’identification des espèces. A terme, on pourrait donc envisager de réduire les échantillonages classiques par pêche.
Cette étude réalisée en petits fonds en estuaire permet d’émettre plusieurs hypothèses quant à la répartition des poissons dans la colonne d’eau au
cours du temps.
La première observation que l’on peut extraire de cette étude est qu’il apparaît que les analyses réalisées à 70 kHz et 120 kHz sont relativement les mêmes ainsi que celles entre les rives de l’estuaire. En jouant sur la valeur du seuil acoustique (-50 dB par exemple), on pourrait ainsi optimiser l’observation des individus par rapport à la turbidité et aux bulles mais surtout permettre de discriminer les espèces et/ou compartiments biologiques (phytoplancton, crevettes, poissons).
De plus, les analyses descriptives et les tests statistiques ont mis en évidence
l’influence des saisons sur la répartition de la biomasse de poissons. Il semblerait donc qu’au printemps et à l’automne les distributions de densités acoustiques de poissons soient structurées préférentiellement dans le fond et le milieu de la colonne d’eau. En été, on retrouve aussi une structuration des individus mais uniquement en direction aval et pour toutes les sections de la colonne d’eau. Hormis l’aval, il n’y a pas de structuration et la colonne est bien plus homogène. En 2004, Lobry J. met en évidence cette idée selon laquelle
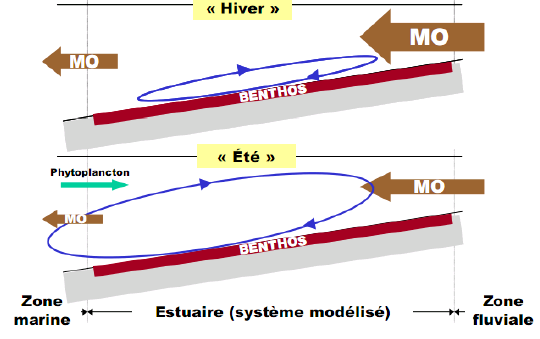
il y aurait une répartition différentielle des flux selon les saisons. En effet, la variation saisonnière de la capacité trophique du milieu conditionne le type de faune présente dans l’estuaire et structure fortement les assemblages. Par exemple, les poisssons « d’été », qui sont planctonophages, sont dépendants du plancton qu’ils ne peuvent consommer qu’à certaines périodes de l’année. En saison estivale, la répartition en direction aval peut alors s’expliquer par le flux de phytoplancton qui compense légèrement celui de matière organique (MO).

- Représentation schématique de la répartition différentielle des flux selon les saisons. (Lobry, 2004)
Il semblerait donc que l’influence du flot, c’est-à-dire lors de la marée montante,
contribut à la distribution à faire évoluer les densités et tailles des poissons. En été, on retrouve une plus grande quantité d’individus dans la colonne d’eau, et plus particulièrement au milieu de la colonne d’eau. Selon Pasquaud S. (2006), les plus grandes diversités d’individus sont observées en début d’été, quand le peuplement ichtyologique est dominé par les espèces euryhalines d’origine marine. Cela pourrait expliquer la présence d’un plus grand nombre d’individus en été et ce, par rapport aux autres saisons.
Il semble également qu’il y ait peu d’individus dans le fond de la colonne d’eau, par rapport aux autres sections de la colonne d’eau, tout au long de l’année. Ces individus benthiques (vivants sur le fond) sont cependant distribués de façon structurée dans cette section.
Une plus grande quantité de données pour certaines mission aurait permis de
conforter les hypothèses de distributions en saison estivale. Les données acquises en hiver nous permettront par la suite de constater l’évolution de la distribution sur une année complète. De plus, il serait utile d’étendre la zone de prospection sur l’ensemble de l’estuaire, plus en aval et/ou en amont pour noter une possible différence de la distribution des poissons en fonction du gradient de salinité. Effectivement, Pasquaud S. a montré (2006) que les secteurs halins colonisés varient en fonction des espèces et des stades d’évolution considérées. Les zones poly-, méso- et oligo-halines jouent donc un rôle majeur pour
l’ensemble des espèces. La salinité et la température sont, selon Lobry J. (2004), les deux principaux paramètres environnementaux ayant une incidence sur la présence et la distribution des espèces en milieu estuarien. Il serait alors intéressant de travailler, lors des missions d’échosondage, avec un capteur de conductivité (pour la salinité) et un thermomètre et plus généralement, avec des sondes multiparamètres, pour avoir un ensemble de paramètres
environnementaux (turbidité, oxygène dissous) à associer aux observations acoustiques.
Aussi, il est désormais intéressant d’étudier la distribution des cibles au niveau des bordures, pour lesquelles on n’a pas eu le temps de faire les tests, afin de compléter les résultats. On pourrait alors avoir une vision globale de la distribution des poissons sur toute la largeur de la zone d’étude.
De même, il faudrait appliquer ces mêmes analyses statistiques aux données de pleine mer d’après-midi afin de constater ou non une évolution de la distribution à l’échelle d’une même journée. Enfin, pour compléter la section de surface, les données acquises à l’horizontal nous apporterons des informations, sur la densité et la taille des individus, pour y évaluer la structuration.
Pour parfaire ces résultats, une étude du rythme nycthéméral pourrait aussi nous renseigner sur la dynamique des poissons. Il faudrait alors réaliser des missions de nuit avec par exemple des stations fixes afin d’obtenir un plus grand nombre de mesure de Target Strenght (TS) (MacLennan & Simmonds, 1992) qu’en parcours car les individus restent plus longtemps sous le faisceau du transducteur et sont ainsi identifiés plus facilement comme des cibles individuelles. Des stations fixes 24h permettraient également de suivre le déplacement des cibles individuelles par rapport aux mouvements de la marée et de pouvoir mesurer l’évolution des biomasses détectées en fonction des rythmes de marées (Sow I. & Guillard J., 2005). Enfin, il se révèlerait avantageux d’appliquer aux données acquises une analyse géostatistique. En effet, les statistiques classiques ne fournissent pas de dimension spatiotemporelle. En appliquant la géostatistique par corrélation spatiale de Petitgas (1993), on pourrait ainsi déduire l’abondance totale dans un espace déterminé à un temps voulu. En 1996, Williamson N.J. et Traynor J.J. ont par exemple appliqué cette théorie qui consiste à fournir une approche pour l’estimation de la variance et la caractérisation de la structure spatiale des relevés acoustiques. Ils ont ainsi utilisés le logiciel Estimation VAriance (EVA)
développé par Petitgas et Prampart (1993). Ce logiciel fournit un mécanisme pour caractériser la structure des données et estimer la variance. Il faudrait, dans notre cas, réaliser plusieurs radiales d’égales distances les unes des autres pour construire une grille sur laquelle on pourrait appliquer les calculs. Dans ces analyses, les données de densité par unité de surface (Sa) le long d’un trajet (cela pourrait être une radiale répétée dans notre cas) ont été moyennées et multipliées par la longueur de ce dernier pour fournir une valeur cumulée.
Une estimation de l’abondance relative totale est obtenue en multipliant la somme des cumuls par la distance entre différents trajets. On pourrait également appliquer l’écho classification, décrit par Demer et al., en 2009, pour l’identification de la taille et de la densité des cibles ou encore la variance à ratio moyen (variance-to-mean ratio « VMR ») dans une fenêtre de temps pour caractériser la dispersion ou le degré d’aléatoire d’un phénomène. Le terrain impose une contrainte à ne pas à négliger : la houle formée par le vent provoque des bulles qui gênent l’analyse sur l’échogramme. Il convient donc de rechercher de nouveaux moyens afin de limiter d’avantage la formation de bulles au niveau du sondeur ou bien de mettre en place une nouvelle technique de correction des bulles comme dans l’étude de F.W.Shabangu en 2009. On éviterait ainsi d’introduire un biais, en surestimant généralement, la biomasse de poissons dans la colonne d’eau. À terme, l’acoustique en estuaire permettra de développer un indicateur bioacoustique de l’ichtyofaune en milieu estuarien afin d’établir un protocole standard d’échantillonnage et de suivi.
BIBLIOGRAPHIE
http://membres.multimania.fr/cpe034...
http://www.mpl.ird.fr/suds-en-ligne...
http://www.simrad.com/www/01/nokbg0...
BLABER.M. & BLABER., 1980. Factors affecting the distribution of juvenile estuarine and inshore fish. Journal of Fish Biology 17 : 143-162.
BOUDOU, 2002. Approche intégrée de la contamination des réseaux trophiques dans l’estuaire de la Gironde In : CASTAING P. (ed) Rapport final LITEAU Gironde : rôle de la dynamique des masses d’eau et des sédiments fins dans les transferts chimiques et biologiques dans l’estuaire, 162-250.
BROSSE L., 2003. Caractérisation des habitats des juvéniles d’esturgeon européen, Acipenser sturio, dans l’estuaire de la Gironde : Relations trophiques, hiérarchisation et vulnérabilité des habitats. Thèse de Doctorat, Université de Toulouse III, 258p.
COSTANZA R., D’ARGE R., DE GROOT R., FARBER S., GRASSO M., HANNON B., LIMBURG K.,NAEEMS S., O’NEILL R.V., PARUELO J., RASKIN R.G, SUTTON P. & VAN DEN BELT M., 1997.The value of the world’s ecosystem services and natural capital. Nature, 387 : 253-260. CTGREF, 1979. Etude halieutique de l’estuaire de la Gironde. CTGREF Div ALA Bx/EDF, 189pp.
DAY J. H., BLABER S. J. M. & WALLACE J. H., 1981. Estuarine fishes In : DAY J. H. (ed) Estuarine ecology with particular reference to Southern Africa, 197-221, Balkena, Cape Town.
DEMER D. A., CUTTER G. R., RENFREE J. S., and BUTLER J. L. 2009. A statistical-spectral method for echo classification. – ICES Journal of Marine Science, 66 : 1081–1090.
DIOUF P.S., 1996. Les peuplements de poissons des milieux estuariens de l’Afrique de l’ouest : l’exemple de l’estuaire de Sine-Saloum, Montpellier II, 267p.
ELLIOTT M. AND HEMINGWAY K., (Editors), 2002. Fishes in Estuaries. Blackwell Science, Oxford.
FAIRBRIDGE R., 1980. The estuary : its definition and geodynamic cycle. In : Olausson E. and Cato I. (Ed.), Chemistry and biogeochemistry of estuaries, Wiley, New York.1-35.
FRANKIGNOULLE M., ABRIL G., BORGES A., BOURGE I., CANON C., DELILLE B., LIBERT E. & THEATE J. M., 1998. Carbon Dioxide Emission from European Estuaries. Science, 282 : 434-436
GIRARDIN M., CASTELNAUD G. and LAPLAUD A., 2007. Surveillance halieutique de l’estuaire de la Gironde - Suivides captures 2005 - Étude de la faune circulante 2006. Rapport pour EDF CNPE du Blayais/ Etude Cemagref, groupement de Bordeaux, Cestas. n°116, 218 p.
GUILLARD J., 1994, Utilisation de l’échosondage dans l’étude des populations de poissons du Sine-Saloum (Sénégal), Rapp.I.L., 94p.
GUILLARD J., 1996. Utilisation des méthodes acoustiques en milieu peu profond : rivières, estuaires, zones côtières. Océanis. 22(1):39-50
GUILLARD J., 1996, Utilisation des techniques acoustiques dans l’étude des migrations des populations de poissons en estuaire (Sine-Saloum, Sénégal), ORSTOM, INRA.
GUILLARD J., COLON B., 1998, Estimation hydroacoustique du nombre de poissons migrateurs franchissant l’écluse de Beaucaire-Vallabrègues (Rhône), INRA, 90p.
GUILLARD J., LEBOURGES-DHAUSSY A. and BREHMER P., 2004. Simultaneous Sv and TS measurements on YOY fresh water fish using three frequencies. ICES Journal of Marine Science. 61 : 267–273.
GROUSSET F. E., JOUANNEAU J. M., CASTAING P., LAVAUX G. & LATOUCHE C., 1999. A 70 year record of contamination from industrial activity along the Garonne river and its tributaries. Estuarine, Coastal and Shelf Science, 48 : 401-414.
KRAEPIEL A. M. L., CHIFFOLEAU J. F., MARTIN J. M. & MOREL F. M. M., 1997. Geochemistry of trace metals in the Gironde estuary. Geochimica et Cosmochimica Acta, 61 : 1421-1436.
LEVENEZ J.-J., 2001. Notions de base en acoustique appliquée aux pêches. Formations CNROP Nouadhibou. 43 p.
LEVENEZ J. –J, LEBOURGES-DHAUSSY A., JOSSE E., 2006, Notions d’acoustique appliquée à l’halieutique et l’écologie aquatique. 77 p.
LOBRY J., 2004. « Quel référentiel de fonctionnement pour les écosystèmes estuariens ? » Le cas des cortèges de poissons fréquentant l’estuaire de la Gironde. Thèse de doctorat de l’université de Bordeaux I, 195 p.
LURTON X., 1998, Acoustique sous-marine, présentation et applications, Ifremer, 110p.
MACDOWALL R.M., 1988. Diadromy in fishes - Migrations between freshwater and marine environments. Croom Helm, London, UK. 308 p.
MACLENNAN D. N., and SIMMONDS E. J., 1991. Fisheries Acoustics. Chapman & Hall, London. 336 p.
MACLENNAN, D. N., FERNANDES, P. G., AND DALEN, J. 2002. A consistent approach to definitions and symbols in fisheries acoustics. – ICES Journal of Marine Science, 59 : 365–369.
MAES, J., TAILLIEU, A., VAN DAMME, P.A., COTTENIE, K. & OLLEVIER, F., 1998a Seasonal patterns in the ish and crustacean community of a turbid temperate estuary (Zeeschelde Estuary, Belgium). Estuarine, Coastal and Shelf Science 47(2) : 143-151.
MARCHAND J., CODLING I., DRAKE P., ELLIOTT M., PIHL L. & REBELO J., 2002. Environmental quality of estuaries In : ELLIOTT M. & HEMINGWAY K. L. (eds) Fishes in estuary, 322-409, Blackwell Science Ltd, London.
MCLUSKY, D.S. & ELLIOTT, M., 2006. The Estuarine Ecosystem - ecology, threats and management,214 pp.
MESNIL B., 2003. Dynamique des populations exploitées et principaux modèles démographiques appliqués à la gestion des pêches. In Exploitation et surexploitation des ressources marines vivantes. Académies des sciences, Rapport sur la science et la technologie 17, Edition Tec & Doc., Paris. 123-155.
MÖLLER H., 1987. Spawning and feeding migrations of fishes in the Elbe estuary In : Proceedings of the 5th International Wadden Sea Symposium, Copenhagen.
NICOLAS D., 2010. Des poissons sous influence ? Une analyse à large échelle des relations entre les gardients abiotiques et l’ichtyofaune des estuaires tidaux européens. Thèse de doctorat de l’université de Bordeaux I, 213 p.
ODUM W.E., HEALD E.J., 1975, The detritus based food web of an estuarine community, Academic press, New-York, 285p.
PASQUAUD S., 2006. Les relations trophiques : éléments de structuration des peuplements ichtyologiques en milieu estuarien. Application à l’estuaire de la Gironde. Thèse de doctorat de l’université de Bordeaux I, 359p.
PEIRSON G. and FREAR P.A., 2003. Fixed location hydroacoustic monitoring of fish populations in the tidal River Hull, north-east England, in relation to water quality. Fishery Management and Ecology. 10 : 1-12.
PETITGAS, P. 1993. Geostatistics for fish stock assessments : a review and an acoustic application. ICES Journal of Marine Science, 50 : 285–298.
PETITGAS, P. AND PRAMPART, A. 1993. EVA : a geostatistical software on IBM-PC for structure characterization and variance computation. ICES CM 1993/D : 65, 55 pp.
PIHL, L., CATTRIJSSE, A., CODLING, I., MATHIESON, S., MCLUSKY, D.S. & ROBERTS, C., 2002. Habitat use by fishes in estuaries and other brackish areas. In : Elliott, M. and Hemingway, K.L. (Eds), Fishes in estuary. Blackwell Science Ltd, London, pp. 54-123.
QUINTIN J.Y. (coord.), 2007. Surveillance écologique du site du Blayais, année 2006. Rapport IFREMER RST DYNECO/VIGIES/06-07, mars 2007, 220p.
RINCE Y., 1983. Hydrologie-Planctonologie. Tome II, Minist. Env./Minist. Mer/ C.S.E.E.L., 53p.
ROCHARD E., 2001. Migration anadrome estuarienne des géniteurs de grande alose Alosa alosa, allure du phénomène et influence du rythme des marées. Bulletin Français de la Pêche et de la Pisciculture, 362/363 : 853-867.
ROMAÑA L. A., 1994. Les grands estuaires français. Equinoxe, 47-48.
ROMAÑA L. A., 1998. Le potentiel de recherche français sur les estuaires : comment le mobiliser sur les besoins identifiés lors du séminaire In : AUGER C. & VERREL J.L (eds) Les estuaires français : évolution naturelle et artificielle, 320-328, ifremer.
SALOMON J.-N., 2002. L’inondation dans la basse vallée de la Garonne et l’estuaire de la Gironde lors de la « tempête du siècle » (27-28 décembre 1999). Géomorphologie : relief, processus, environnement, 2 : 127-134.
SCHÄFER, J., BLANC, G., LAPAQUELLERIE, Y., MAILLET, N., MANEUX, E. & ETCHEBER, H., 2002.Ten-year observation of the Gironde tributary fluvial system : fluxes of suspended matter, particulate organic carbon and cadmium. Marine Chemistry 79(3-4) : 229-242.
SIMMONDS E. J. and MACLENNAN D. N., 2005. Fisheries Acoustics : Theory and Practice. Oxford : Black-well Science Ltd., 437 p.
SOW I., GUILLARD J., 2005. Suivi de stations fixes de nuit dans l’Aire Marine Protégée Bamboung (Sine Saloum, Sénégal). Rapp. I.L., 260-2005, 11p.
STEIG T.W., JOHNSTON S.V., 1996. Monitoring fish movement patterns in a reservoir using horizontally scanning split-beam techniques, ICES Journal of Marine Science, 53p.
THORNE R.E., 1997, Experience with shallow water acoustics, fish.res., sous presse.
WHITFIELD A. K., 1996. Fishes and the environmental status of South African estuaries. Fisheries Management and Ecology, 3 : 45-57.
WILLIAMSON N. J. and TRAYNOR J. J. 1996. Application of a one-dimensional geostatistical procedure to fisheries acoustic surveys of Alaskan pollock. – ICES Journal of Marine Science, 53 : 423–428.
Témoignages
Suivez notre actualité sur les réseaux sociaux :
